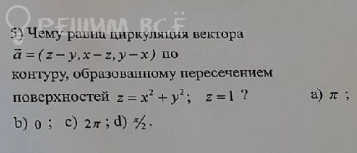
Задача 65158 Чему равна циркуляция вектора...
Условие
математика ВУЗ
375
Решение
★
[m]Q(x;y;z)=x-z[/m]
[m]R(x;y;z)=y-x[/m]
Ц=[m] \oint_{L} \vec{a}dr= ∫ ∫_{ σ }rot \vec{a}\cdot \vec{n}d σ [/m]
[m]rot\vec{a}=\begin {vmatrix} \vec{i}&\vec{j}&\vec{k}\\\frac{ ∂ }{ ∂x }&\frac{ ∂ }{ ∂y }&\frac{ ∂ }{ ∂z }\\z-y&x-z&y-x\end {vmatrix}=2\vec{i}+2\vec{j}+2\vec{k}[/m]
[m]\vec{n}=\vec{k}=(0;0;1)[/m]
[m]∫ ∫_{ σ }rot \vec{a}\cdot \vec{n}d σ = ∫ ∫_{ σ } (2\cdot 0+2\cdot 0+2\cdot 1)d σ =2∫ ∫_{ σ }d σ=2 S_(σ) [/m]
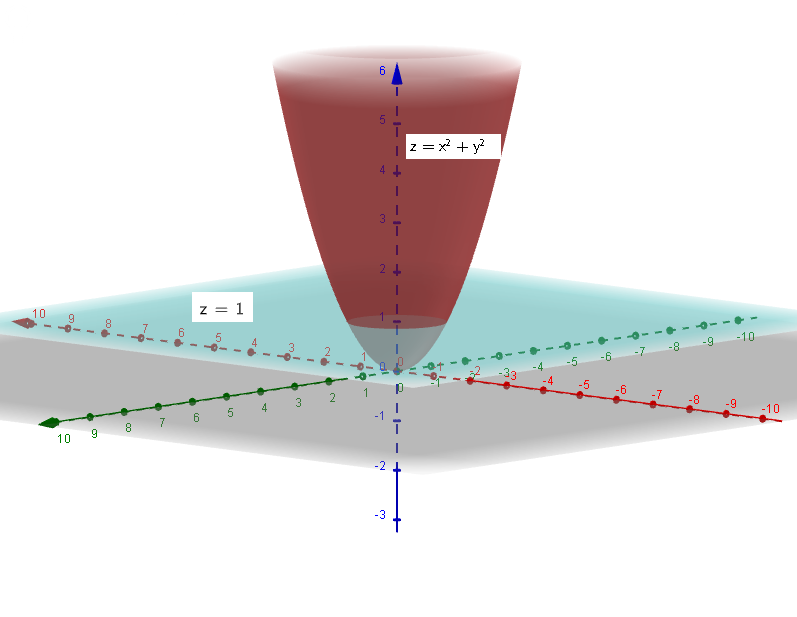
σ - круг радиуса 1
Площадь круга радиуса 1 равна π
⇒ S_(σ)= π
О т в е т. 2π